Q-Learning : Off-Policy TD Control
Q-Learning is defined by:
\[Q(S_{t},A_{t}) ← Q(S_{t},A_{t}) + α \left[ R_{t+1} + γ \text{max}_{a} (S_{t+1},a) - Q(S_{t},A_{t})\right]\]Here, the learned action-value function, \(Q\), directly approximates the optimal action-value \(q_{⋆}\), independent of the policy being followed. The policy still has an effect as it determines which state-action pairs are visited and updated. However, for correct convergence it is required that all pairs continue to be updated.
Therefore, as each state-action pairs needs to be visited and updated, independent of the choice of policy being followed, this algorithm enable early convergence.
Expected SARSA
It follows the schema of Q-Learning, but with the update rule. Instead of using maximum over state-action pair, it uses expected value, taking into account how likely each action is under the current policy.
\[Q(S_{t},A_{t}) ← Q(S_{t},A_{t}) + α \left[R_{t+1} + γ \mathbb{E}_{\pi} \left[Q(S_{t+1},A_{t+1}) \mid S_{t+1}\right] -Q(S_{t},A_{t})\right]\] \[← Q(S_{t},A_{t}) + α \left[R_{t+1} + γ \sum\limits_{a} π (a \mid S_{t+1}) Q(S_{t+1},a) - Q(S_{t},A_{t})\right]\]Expected SARSA shows significant improvement over SARSA over a wide range of values over for the step-size parameter \(\alpha\). Expected SARSA has another advantage of having lower variance than seen in SARSA due to random selection of \(A_{t+1}\)
When using one-step \(TD\) or \(TD(0)\), the time step determines both how frequently the action can be changed and the time interval over which bootstrapping is performed.
Ideally, bootstrapping works best when conducted over a duration in which a significant and recognizable state change has occurred. N-step bootstrapping allows for this to happen across multiple time steps.
N-step TD prediction
N-step TD prediction involves using N-step updates, which are still considered TD methods because they update earlier estimates based on differences from later estimates. However, when these TD methods are extended over N steps, they become N-step TD methods.
In one-step updates, the target is the first reward plus the discounted estimated value of the next state. Thus, the one-step return is defined as:
\[G_{t:t+1} \cdot R_{t+1} + γ V_{t}(S_{t+1})\]For two-step updates, the return is calculated as :
\[G_{t:t+2} \cdot R_{t+1} + γ R_{t+2} +γ^{2} V_{t+1}(S_{t+2})\]For N-step updates, the return is computed as :
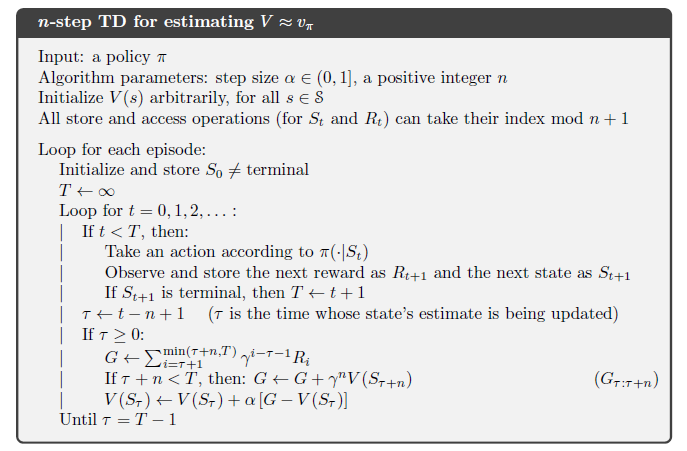
\[G_{t:t+n} \dot{=} R_{t+1} + γR_{t+2} + \cdots + γ^{n-1}R_{t+n} + γ^{n}V_{t+n-1}(S_{t+n})\]for all \(n,t\) such that \(n \ge 1\) and \(0 \le t \lt T-n\). Psuedo Code for n-step TD is given below:
Note: n-step returns for \(n \lt 1\) involve future rewards and states that are not available at the time of tansition from \(t\) to \(t+1\), but only after seeing \(R_{t+n}\) and computed \(V_{t+n-1}\). n-step return uses the value function, \(V_{t+n-1}\) to correct for the missing rewards beyond \(R_{t+n}\)
The natural state-value learning algorithm for using n-step returns is thus :
\[V_{t+n}(S_{t}) \dot{=} V_{t+n-1}(S_{t}) + α[G_{t:t+n} - V_{t+n-1}(S_{t})]\]while the values of all other states remain unchanged: \(V_{t+n}(S) = V_{t+n-1}(S)\), for all \(s ≠ S_{t}\). This algorithm is called n-step TD.
An important aspect of n-step return is that their expectation is guaranteed to be a better estimate of \(V_{\pi}\) than \(V_{t+n-1}\) is, in a worst-state sense. That is, worst error of the expected n-step return is guaranteed to be less than or equal to \(γ^{n}\) times the worst error under \(V_{t+n-1}\)
\[\max_{x}[\mathbb{E}_{\pi}[G_{t:t+n} ∣ S_{t} = s] - V_{\pi}(s) \le γ^{n} \max_{s}[V_{t+n-1}(s) - V_{\pi}(s)]]\]This is called error reduction property of n-step returns.
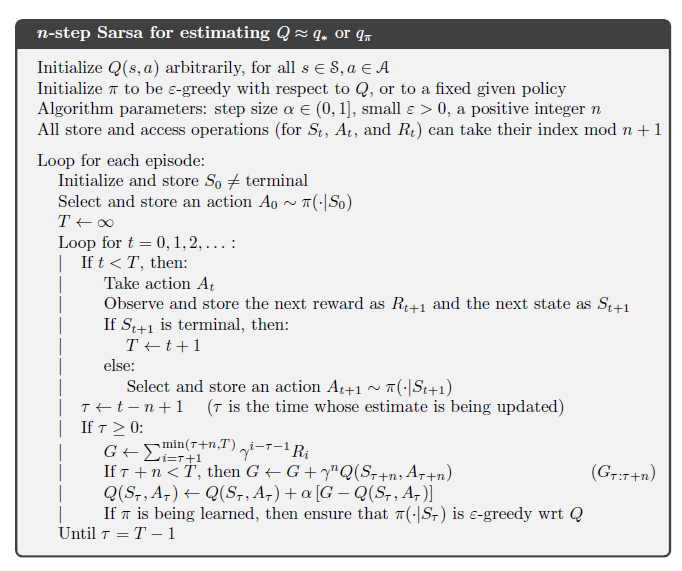
n-step SARSA
N-step of version of SARSA is called n-step SARSA. The main idea is to simply switch states for action (state-action pair) and then use \(∈ -\text{greedy}\) policy. Here, we redefine n-step returns (update targets) in terms of estimated action-values.
\[G_{t:t+n} \dot{=} R_{t+1} + γR_{t+2} + \cdots + γ^{n-1}R_{t+n} + γ^{n} Q_{t+n-1}(S_{t+n},A_{t+n})\]with \(G_{t:t+n} \dot{=} G_{t}\) if \(t+n \ge T\) . The natural algorithm is then :
\[Q_{t+n}(S_{t}, A_{t}) \dot{=} Q_{t+n-1}(S_{t},A_{t}) + α [G_{t:t+n} - Q_{t+n-1}(S_{t},A_{t})]\]with the values of all other states remain unchanged: \(Q_{t+n}(s,a) = Q_{t+n-1}(s,a)\). Pseudo Code for it is given below: